G1: Week 1
(I'm hoping to write weekly notes here as I tinker with Unitree G1)
tl;dr
- Stood up the G1 and the Unitree Python SDK
- Setup Isaac Lab so we could explore training policies
Learnings
- I didn't expect to feel so blasé about a biped robot walking around my office -- DJI drones and even a 3D printer felt more 'magical.' While my brain understands that it walking is impressive, the gut reaction is 'well, ya, there it goes...' Maybe it's because I see people walking on two feet all the time?
- Between Unitree's documentation and github repos, setup was straightforward -- whenever I didn't know what to do, my best guess was correct. If you feel unsure or want some help, drop me a line! (I'll probably be more diligent with my weekly notes as we explore less well-trodden territory).
- Isaac Lab is pretty cool (specifically mdp)
Potential next steps
In no particular order...
- Train and deploy a very, very simple policy for G1 (e.g. raise arms)
- Setup mujoco sim so we can experiment without turning on the robot
- Swap out AVP for Quest in their teleop repo
- Design and print some booties for the G1's feet so I can walk it around outside without tracking dirt back in the offce
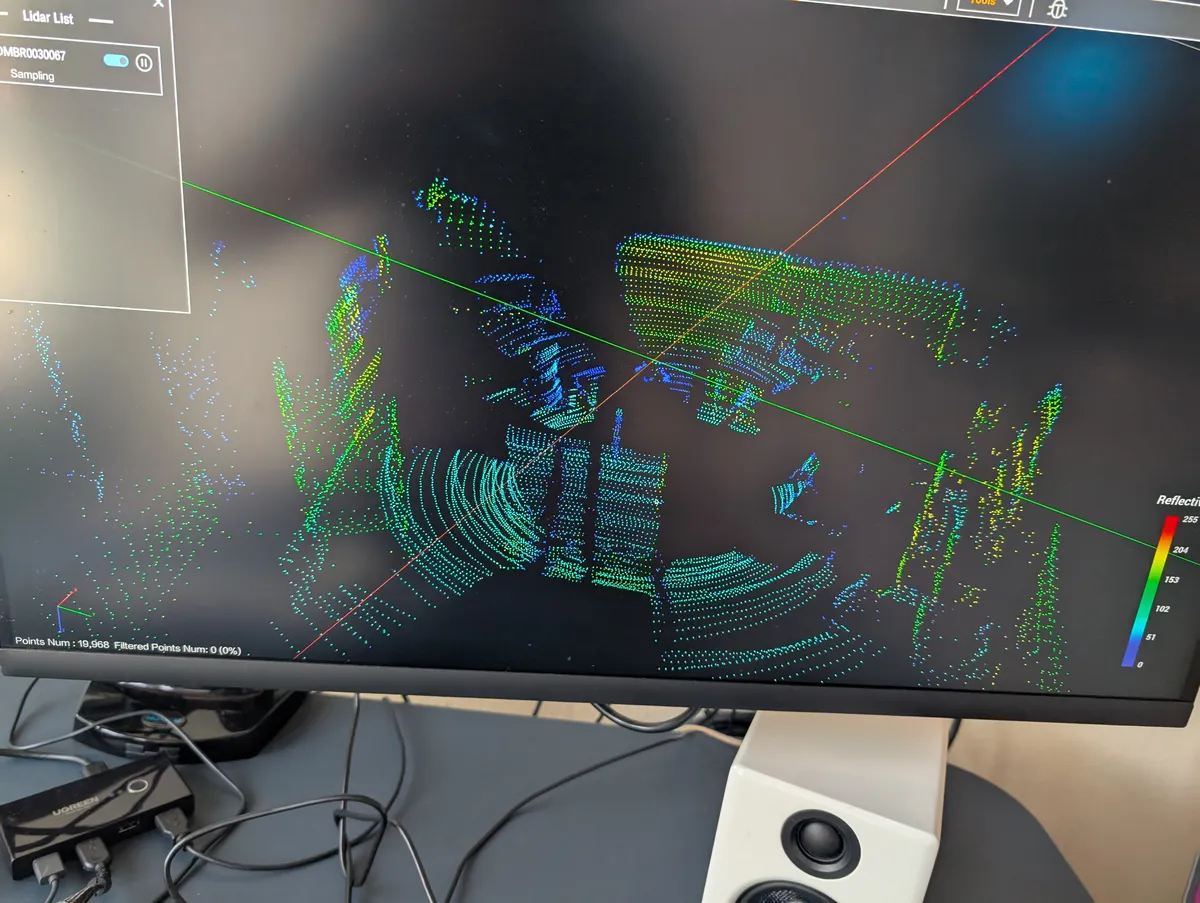
- Programmatically access LIDAR and RealSense and record dataset for offline exploration of current SLAM / splatting techniques