G1: Week 3
tl;dr
- Trained a simple 'hello world' policy with Isaac and Mujoco that trains the robot to lift its left arm
- Many headaches around USD<>MJCF<>URDF so no deployment to hardware but cautiously optimistic we do it this week
- Created a new MJCF that reflects both the Mujoco menagerie's format and the latest Unitree G1 URDF and the PD values of the sdk2 repo
- Setup a new work computer (4090 is a huge improvement)
- The booties work!
Learnings
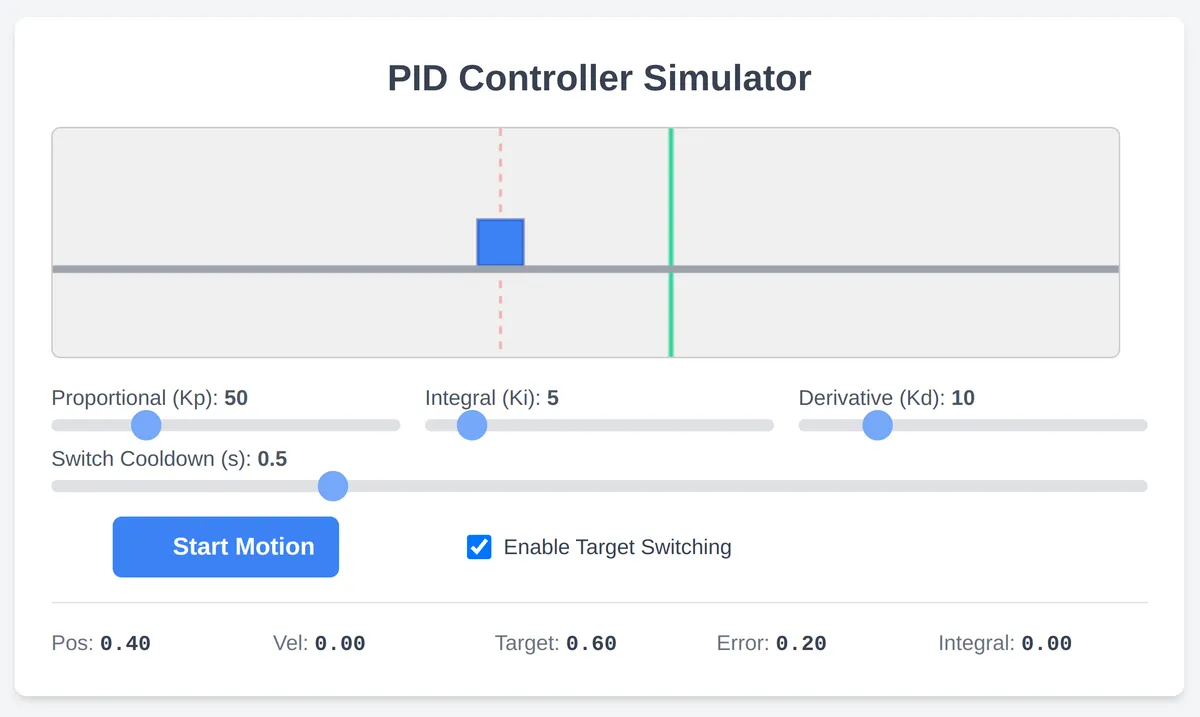
- Grokked PD control (I think?) thanks to Gemini Canvas, where we vibecoded this interactive toy demonstrating springs and damping
- The rest of the learnings for this are either lizard brain familiarity with the weird pointy bits of MJCF and USD or very specific things that I should probably write down for future me (e.g. cyclonedds works with python 3.10 but not 3.11)
- It feels good to train models again (it's been awhile!)
Potential next steps
- Deploy the Mujoco policy
- If that works, deploy a balancing policy (or even... walking!)
- I might come back to Isaac but USDs, man... idk.